在數字政府建設加速推進的背景下,網絡安全已成為保障政務系統穩定運行、數據安全流通的生命線。銳捷網絡憑借其深厚的技術積累與對政務場景的深刻理解,為天津政務網提供了全方位的網絡安全產品與解決方案,通過體系化部署與智能運維,成功實現了四大顯著成效,為天津市的數字政務高效、安全運轉提供了堅實保障。
成效一:構建主動防御體系,實現威脅智能感知與快速響應
面對日益復雜和隱蔽的網絡攻擊,傳統的被動防御已力不從心。銳捷網絡為天津政務網部署了基于AI與大數據分析的下一代防火墻、入侵檢測與防御系統(IDS/IPS)以及高級威脅檢測設備。這些設備協同工作,構建起一個主動、智能的防御體系。系統能夠實時分析全網流量,精準識別勒索軟件、APT攻擊、漏洞利用等高級威脅,并通過自動化劇本實現威脅的快速隔離與處置,將安全事件的影響降到最低,極大提升了政務網絡面對未知威脅的“免疫力”。
成效二:強化邊界與內網安全,保障核心業務零中斷
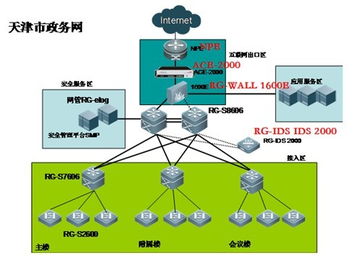
政務網絡承載著大量關乎民生與社會治理的核心業務系統,業務連續性要求極高。銳捷解決方案通過精細化的安全域劃分與訪問控制策略,在互聯網出口、上下級單位互聯邊界、內部關鍵區域之間建立了多層次、立體化的防護屏障。部署的負載均衡與鏈路優化設備,確保了即使在單點故障或網絡波動情況下,關鍵業務訪問依然流暢、穩定。此舉有效抵御了來自外部的DDoS攻擊和非法訪問,并防止了內部潛在風險的橫向擴散,為核心政務應用的“永不掉線”提供了網絡與安全的雙重保障。
成效三:實現全網設備統一可視、精準管控與合規審計
天津政務網規模龐大,設備種類和數量繁多,管理復雜度高。銳捷提供的統一網絡管理與安全運維平臺,將全網的安全設備、網絡設備納入同一視圖進行集中監控與管理。管理員可以清晰洞察全網安全狀態、資產分布、策略效力與合規情況。平臺支持策略一鍵下發、漏洞統一掃描與修復指導,并生成符合等保2.0及相關政務安全要求的詳細審計報告,極大簡化了運維工作,提升了管理效率,確保了安全策略的一致性與合規性,讓安全管理變得可知、可控、可追溯。
成效四:賦能安全運營,提升整體安全效能與人員能力
銳捷的方案不僅提供產品,更注重安全運營能力的交付與提升。通過部署的安全感知平臺與專業的服務,為天津政務網運營團隊提供了持續的風險評估、攻防演練、應急響應支持與專業知識培訓。這使得客戶的安全團隊能夠從繁重的日常告警處置中解放出來,更專注于安全策略的優化與安全態勢的宏觀把控,實現了從“被動救火”到“主動運維”的轉變,整體安全運營的成熟度與效能得到顯著提升,形成了長效的內生安全能力。
銳捷網絡安全產品與服務在天津政務網的成功實踐,標志著通過專業、智能、體系化的安全建設,能夠有效應對數字政務面臨的新型安全挑戰。四大成效——智能主動防御、業務高可用保障、統一高效運維、運營能力賦能——共同構成了一套可復制、可推廣的政務網絡安全建設范式,不僅筑牢了天津政務數字化的安全底座,也為全國各級政務網絡的穩健運行與安全發展提供了有價值的參考。隨著技術的持續演進,銳捷網絡將繼續攜手客戶,共同護航數字政府建設行穩致遠。